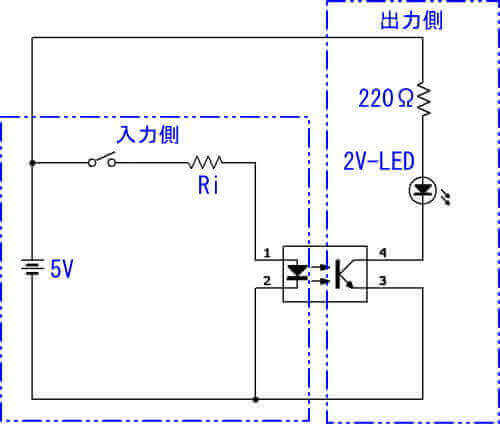
フォトリフレクタは、光を利用する素子の「透過型のフォトインタラプタ」と同様に、LEDとフォトトランジスタを一体化させた電子部品です。
これは、赤外線LEDからの受光量によって、出力値が変化することを利用して、位置検知や品物の有無の検出などに使える部品です。 価格も安価なので、趣味の電子工作に使ってみましょう。
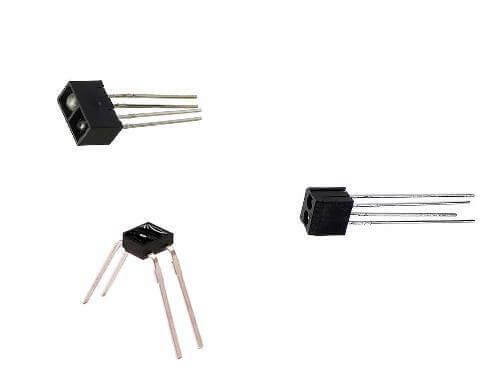
ここでは、LBR-127HLDという部品を使って説明しますが、上のように、いろいろなものが入手できます。いずれの単価も100円以下で安価ですがら、気兼ねなく使えます。
 |
|
新品価格 |
![]()
フォトリフレクタ LBR-127HLD

この部品は、発光側のLEDと受光側のフォトトランジスタを合体させたものですので、合計4本足になっています。
足の長さを変えている製品もありますが、間違いやすいので、まず最初は、データシートの接続図を見て確認するのがいいでしょう。
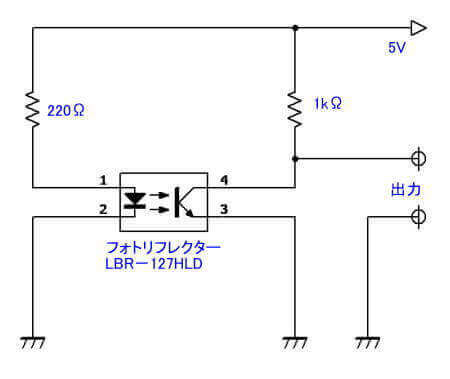
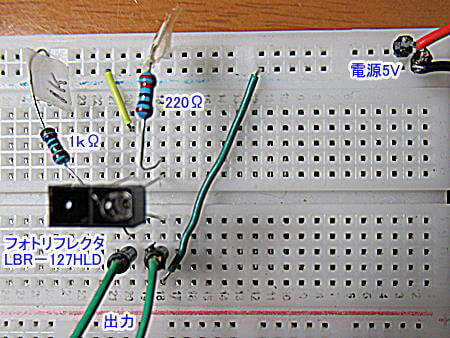
この回路図を使って、どのような特性になっているのかを確かめました。この「1kΩ」の保護抵抗は、フォトインタラプタのページ(→こちら)で確認したように、何でもよくて、ここでは、1kΩにしただけです。
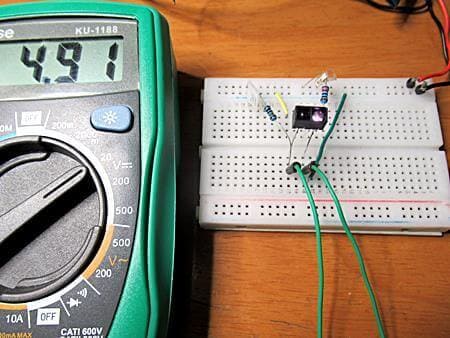
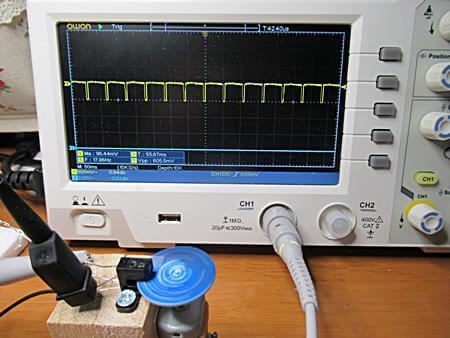
フォトリフレクターの上部に何も障害物がなければ、下の写真のように4.91Vの電圧出力がありました。
これは、ほぼ電源電圧と同じ電圧です。また、インスタントカメラでは赤外線LEDが光っているのがわかります。
受ける光量が増える(すなわち、障害物があってより多くの反射光が返ってくる)と、この電圧が低くなっていきます。
電流変化もありますが、ここでは、電圧変化で見ています。
フォトリフレクターで色の違いを判定する
太陽光などの光は、黒いものに吸収されやすい性質があります。
このフォトリフレクタは赤外光ですが、「光」ですから、黒い色と白い色に光線を当てると、白い色のほうが光線が返ってくるので、上の回路であれば、電圧が低くなります。
これを使えば、光線を反射させる色の違いなどの反射度合いの違いが電圧差としてわかります。
それを利用して、例えば、よく行われている例としては、ロボットマウスなどを「引かれた線」に沿って動く動作をさせること … などに使われています。
これを確認してみましょう。
黒い線を引いて、白と黒の部分の電圧差をみる
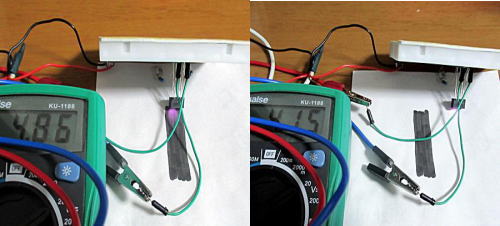
ここでは、紙に黒い線を引いて、上の回路で、白の部分と黒の部分との電圧の差を見たところ、0.71Vの差があり、電圧が低くなる白い色では、赤外光の反射度合いが高いことがわかります。
左が黒い部分に赤外光を当てており、右は白い部分に当てています。
これはもちろん、紙との距離による差や角度の影響もでますので、きっちりと、センサーと対象物の距離を固定して測定すると、微妙な色の差(反射度の差)なども検出できるでしょう。
ここでは、厳密な実験ではないので、「違いの差が出ます … 」ということを示しているだけです。
フォトリフレクターで距離を測る
次は距離の測定について見てみましょう。
一般で使われている「距離計・距離センサー」なども、同じ仕組みを利用しているのですが、反射した赤外線をフォトトランジスタが捉える量によって電圧・電流に差が生じます。
このLBR-127HLDの測定距離は10mm程度となっていて、長距離用の製品も販売されています。
この型番は、ここで実験しているような長距離に対応していませんが、仕様を無視して、どのような特性になっているのかもみています。
電圧と距離の関係がわかれば、センサーと測定物との距離がわかるはずですね。
もちろん、形状的には、赤外LEDとフォトトランジスタを合体させただけの形状ですので、近接しすぎる場合や、遠方過ぎる場合は、LEDの光量の直線性や変化量は信頼性が低くなるのは仕方ないでしょう。
LBR-127HLDのデータシートに、距離と電圧の関係資料がないので、実際に使用しようとする場合には、当然、その関係性を調べて、条件を決めるないといけません。
そこで実際に測定してみます
【注意】これは、使用範囲を超えた使い方ですので、あくまでも測定例です。
ここでは、下のように、鏡に反射させた場合と、圧縮ボード(MFD材)の場合で、出力の状態を見ました。
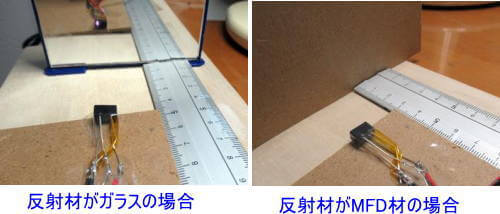
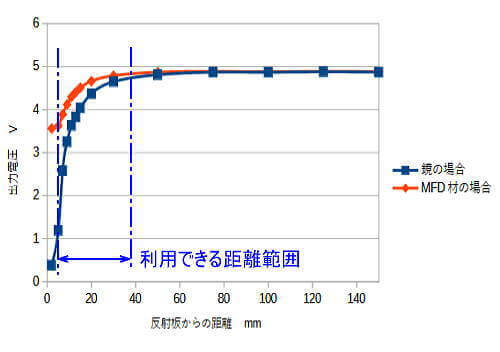
仕様の範囲外ですので、このようになりましたが、障害物に接近しすぎた場合や、遠く離れた場合は使えませんが、距離と電圧の関係が見られる部分では、何らかの使い方ができるようです。
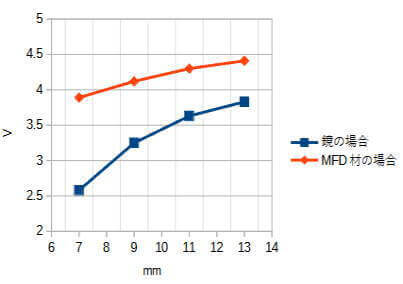
また、小さな距離範囲では、そこそこ直線的なので、範囲を限定すれば、精度が上がります。
コンパレータの回路を使って、ある電圧で位置を特定させてアクションをさせれば、「10.3mmまで近づくと音を出す … 」などの操作は、そんなに難しい回路を付加しなくても使える感じです。
そこで、マイコンなどを使わない方法で使用例を考えてみましょう。
使用例:障害物までの距離を検知する方法
距離と電圧の関係はアナログ的ですが、例えば、**mmになったら警報を出したい等の動作は、オペアンプのコンパレータ回路を利用すると、少ない部品で簡単に使えます。
たとえば、ロボットが壁に近づいたときに方向転換したり、別の動作を加えたりさせることもできますね。
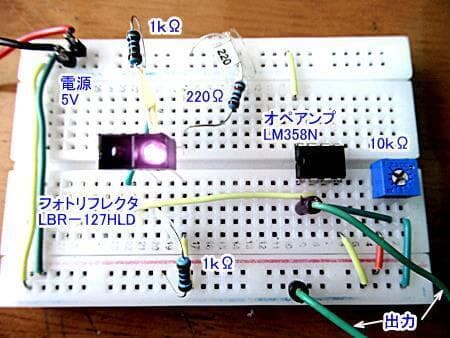
オペアンプは、今まで使っている安価で汎用性の高い LM358N を使っていますが、片電源の汎用オペアンプが使いやすいのですが、どんなものでもいいので、安価なもので試してみてください。
LM358Nを使ったコンパレータは、下の回路を、オペアンプのページ(→こちら)で紹介しています。
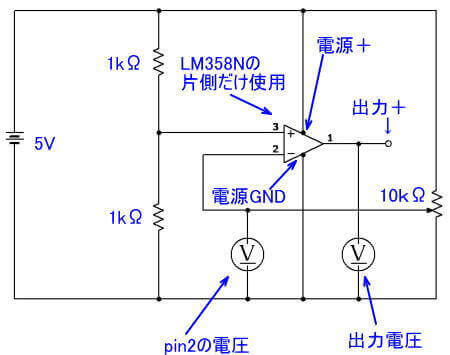
ここでは、ピン3に加える電圧は5Vの半分になるようにして、ON-OFFしたい電圧は、10kΩのボリュームを使ってピン2に加わるようにしています。
そして、ピン2の電圧がピン3よりも大きくなったら、出力がゼロになります。
それと同様に考えれば、今回は、フォトリフレクターの電圧が、距離に対応する電圧になれば出力がON(またはOFF)になればいいことになります。
そこで、次のような回路を考えてみました。
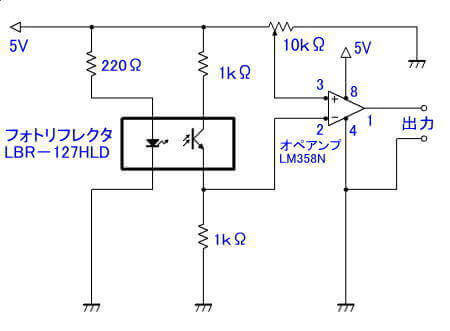
まず、10kΩのボリュームで、判定しようとする電圧(=距離)を決めます。
実際に使用する場合は、電圧と距離の関係を測定して電圧を決めるよりも、実際にセンサを壁などに近づけたときに、うまく反応するように、このボリュームを調節するといいでしょう。
このオペアンプは、5Vの電源電圧では、障害物がないときには3.63Vの最大電圧が出力されており、障害物を近づけるとフォトレフレクタの電圧は下がっていくのですが、その電圧が、設定した値まで下がると、それを境に出力電圧はゼロになります。
こんなイメージです。
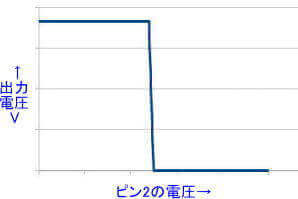 (イメージ)
(イメージ)
これは原理的なものを見るための実験回路ですので、出力がMAXから0になるような回路ですが、例えば、反対の動作で、センサが対象物に近づくと何かの動作をさせるためにMAX電圧をかける方法 … なども同様にして考えられますので、いろいろ試してみてください。
このHPは、電子工作のヒントを書いていますので、具体的な応用例は別に考えることにして、この内容は以上とします。