電子工作や模型の工作では、DCモーターは必須のアイテムです。
直流電流がコイルに流れて回転力が生じて回転するという原理で、その電流の向きを変えると逆転し、電圧によって回転速度が変化します。
極性を変えると正逆転でき、電圧の変化で回転速度を簡単に変えることができる使いやすさがあります。
何よりも、小型のDCブラシ付きモーターは100円程度から購入できます。
加える電圧によって簡単に回転数が変えられるし、変速機を組み合わせて、いろいろな場面で使えますので、運搬、ポンプ、ファン、ロボット、など、電子工作にはどんどん使っていきたいアイテムです。
このページの内容は、なんでもやってみようという趣旨のもので、専門的な内容ではありませんし、実験したことを記事にしているだけの内容ですから、工作に使えそうなところは、自分で再確認して利用いただくようにお願いします。
DCモーター以外に、ステップモーターやサーボモーターなども使われるようになっていますが、このDCモーターは、模型などの工作の基本ですし、この、小さなブラシ付きモーターを自由に使えるようになるだけでも、結構面白みがあります。
ここでは、あまり難しいことは抜きにして、基本の基本として、DCモーターの使い方や、「モーターってこんなモノ」… という程度に見ていただくといいでしょう。
ブラシ付きのDCモータ
下は、どこでも手に入るDC小型モーターです。
ここで使用しているRE280はマブチモーター製で、FA130 はメーカー不明のノーブランドの製品です。


左は、FA130 として購入しましたが、どうも、マブチ製のFA130 とは仕様が異なるようで、パワーは小さいものの、軽やかすぎるくらいに静かに回転してくれます。
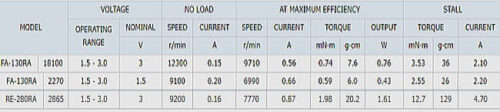
この表はマブチモーター(株)さんのカタログの抜粋です。
ここにある、「NO LOAD」は無負荷の状態で、「AT MAXMAM EFFICIENCY」は最大効率の状態、「STALL」は負荷を強めて回転が止まった時の状態の値です。
1.5V~3V程度で使用し、無負荷で毎分9000回転以上で回ります。1秒間に150回も回るのですね。
ただ、ここで使う FA130 は、この表の値とは違っています。記事を見るときは注意ください。
同じFA130の表示でも、各社の仕様は違っているようです
私の手持ちのものは、仕様はマブチモーター製のFA130とは別物です。
無負荷で回転させたときの電流を測定すると、2Vのとき27.7mA、3Vで30.6mA、3.5Vで31.4mAで、(後で出てきますが、)少し負荷をかけても、100mA以下と、消費電流は、上のカタログの数値よりも格段に小さい電流量で気持ちよく回ってくれています。
逆にパワーは低い感じですが、これも使い方を考えると利点です。
ためしに、タミヤさんのギヤボックスにもFA130型のモーターがついています。これにも銘板(表示ラベル)はありませんので、回転させて電流測定したところ、1.5Vで200mA、3Vで260mAで、これは、マブチさんのFA130のカタログ値に近い値です。

【参考】TAMIYAさんではいろいろ工作に使える商品を取り扱っています。電子工作でもモーターと合わせて使えそうなものもあって、HPの商品群を眺めて、使えそうなものを探してみるといいでしょう。
![]() [PR]TAMIYAのショップの紹介
[PR]TAMIYAのショップの紹介
外観は変わりません、しかし、仕様は違うようです


2つのFA130タイプを並べてみますと、左側がギヤーボックスに付属のFA130、右側が無印FA130で、外観形状はほぼ同じですが、全く仕様が違います。
そこで、このあとの記事は、マブチ仕様のモーターでないのですが、「モーターとはどういうものなのか」を見るだけですので、この右側の低消費電力のFA130型を使って実験しています。
DCモーターで発電してみましょう
エンジン(Engin)は発動機で、モーター(Motor)は電動機で、電気を用いて回るのが電動機、力を加えて回転させることで電気を起こすのが「発電機」です。
そして、基本の構造は同じなので、DCモーターを外力で回すと発電するはずです。
そこで、2つの小さなモーター(手持ちのFA-130型の低電流タイプのもの)を2つジョイントして片方を回転させておいて、もう片方の電圧をテスターの直流レンジで測ってみると、回転によって発電していることがわかります。
注意:後でもでてきますが、ここで発電された電気は直流ではないのですが、とりあえず、その値を測定しているだけです。また、テスターの値はマイナス表示になっていますが、間違って、逆に結線しているためです。正しくつなぐとプラス表示になります。


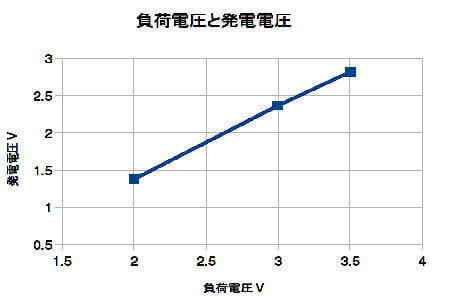
このように、電動機側の電圧(負荷電圧)をあげていくと、回転数が上がっていきますから、それに伴って、発電する電圧も高くなっています。
負荷電圧と発電電圧は、この電圧範囲内では、ほぼ正の比例関係にあるようです。
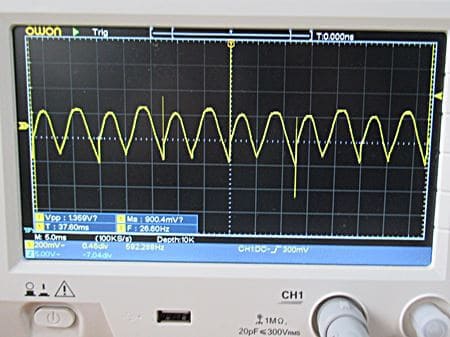
発電された電気はちょっと変なもののようです
その出力電圧をオシロスコープで見ると、きれいなサイン波にはなっていません。
どうも、きれいな交流になっていないのは、モーターの構造によるものなのでしょう。
例えば、このDCモーターは3極ローターのモーターで、発電用でないものなので、このような変な「脈流波形」になっているようです。
整流されたような電気なので、テスターで数値が表示できていたようですね。
ここでは、ともかく、DCモーター軸を回転させると、「発電する」というところだけを見ておいてください。
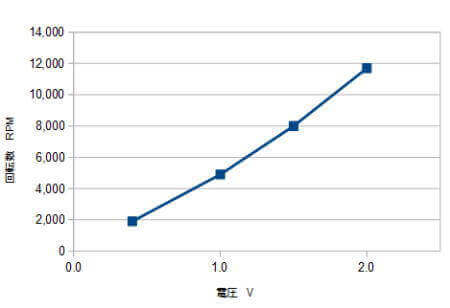
DCモーターは電圧を上げれば回転数が上がる
1秒間で150回を数えるのは大変ですから、ここでは、タミヤのギヤボックスNo.167を利用して、そこにFA130タイプのDCモーターをつけて、軸の回転数を数えてRPM(毎分の回転数)を算出しています。(あえてこんな方法をやってみました)
2つのFA130では、こんなに違います。

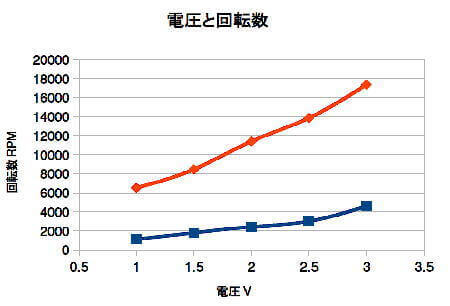
青色の線が、手持ちのFA130モーターで、赤色がタミヤのギヤボックスに付属のものです。(赤色が、マブチ製に近い数値のものとして見ていただくといいでしょう)
この図のように、電圧を上げると、回転数が上がります。
こともかく、電圧を変えれば回転数が変わるということです。
電圧と消費電流の関係を見ると、面白いことが …
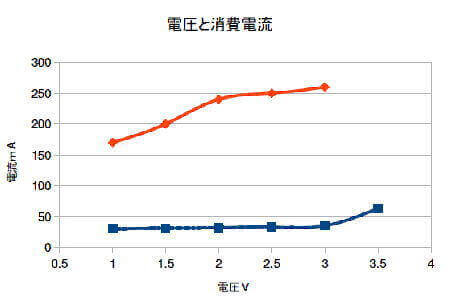
可変電源を用いて、電圧を変えて回転させているときの電流を測定すると、右上がりの線になっていません。
電圧をあげれば、回転数が上がるので、当然、多くエネルキーを消費することになって、電流値は上昇すると予想したのですが、結果は、このように、不思議な結果になりました。
モーターごとに特性は違うということ以外に、モーターごとに、効率の良い使い方ができそうなことや、低電流で回る「無名のFA130」のすごさなどが見えてきます。
ただし、これは無負荷の状態ですので、負荷によって、状態が変わるかもしれませんので、それを考えてDCモーターを使用する条件を考えるのも興味あることですね。
つまり、モーター選びで製品の性能差が生まれる
同じFE130として購入した2つのDCモーターで、全く消費電力も回転数も違っているように、用途によっては、モーターの仕様を知ることは重要になるということです。
レーシングカー模型用のモーターは、多くの種類の型番のものが販売されています。
どれを選ぶのかでスピードやトルクや持続力などが変わってくるとなれば、カタログ値を信じるのではなく、走らせているときの電圧と回転数、回転数とトルク … などを、実際に測定してみるのも、勝つための対策になりそうです。
極限をで使う用途では、モーターに仕様外の高い電圧をかけて無理をさせることもしばしばでしょうし、レーシングコースのアップダウンが激しかったり、高トルクの状態でスピードを維持するためには、モーターの特性を掴むことは、勝負を左右する要素になり得ます。
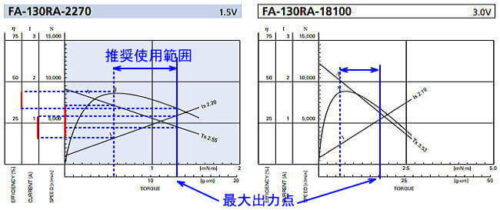
もちろん、モーターのカタログには、下のようないろいろなデータが紹介されていて、それを読み取って特性を高める方法を見つけるのも面白いのですが、専門的になるので割愛します。
モーターが大きいと発電量も大きい
モーター2つの組み合わせで、片方のFA130を回転させて、FA130の場合と、FA280をつないで発電させた場合に、電圧や電流がどうなるのかを見てみました。
本来は、10Ω以下の抵抗を付けて測定するのがいいようですが、小さな電流なので、直接の電流値(ショート電流)を測りました。
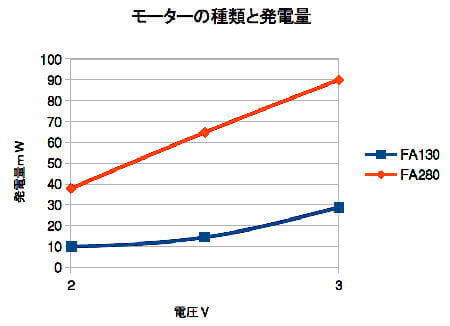
結果は、加える電圧を上げると回転数が上がり、発電量が増えていますし、大きいモーター(この場合はFA280)のほうが、発電量が大きいようです。
回転を反転させるにはプラスマイナスの入れ替える
DCモーターは、加える電圧の極性(プラスマイナス)を変えると反転します。
これはわかりきったことですが、大変基本的で重要なことです。 実際の方法は、・・・
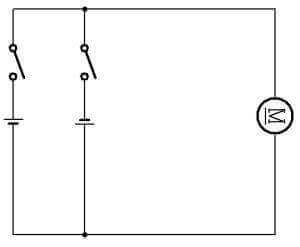
①電池(電源)を2つ用意してどちらかのスイッチを入れる
スイッチを入れた方の電圧が加わるようにすれば、任意の方向に回転させることが出来ます。
両方同時にスイッチを押すと、回路中でショート(短絡)します。
だから、そのために、a接点(押すとスイッチが入る)とb接点(押すつスイッチが切れる)の連動スイッチ(2回路スイッチ)を使うといいでしょう。
 電池を入れ替えるイメージ①
電池を入れ替えるイメージ①
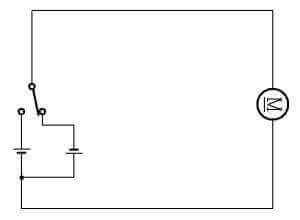
②電池(電源)を2つ用意する場合は、次のような切り替えスイッチ(1回路2接点スイッチ)でも同様の正逆転操作ができます。
この場合、スイッチに中立の位置があって、どちらにも電流が流れないようになっていると、逆転時の負荷が軽減できます。
②電源(電池)を2つ用意して、切り替えスイッチで切り替える
③電源を1つで2回路2接点スイッチを使う
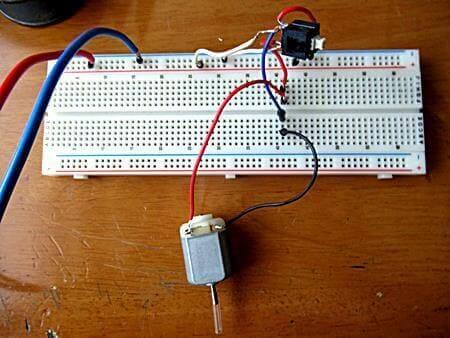
持ち合わせのスイッチを使って、この回路の確認をしてみました。
鉄道模型で、電車の方向を変えるのを、1つのスイッチだけを使ってやっていたのは、このような方法ですね。
モータードライバーを使う反転動作
これは、後で紹介する「Hブリッジ」と呼ばれるものを使っており、4つの単機能スイッチを使って反転動作をさせています。
一般的には、モータードライバーでは、トランジスタのスイッチ機能を利用しています。
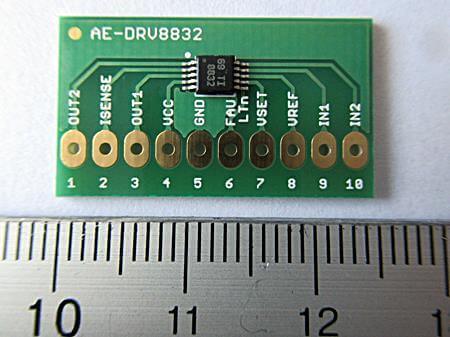 モータードライバーの例
モータードライバーの例
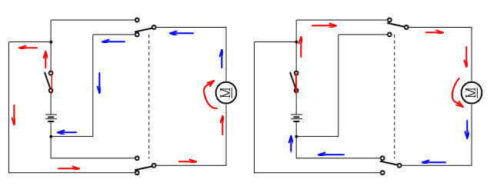
Hブリッジ回路について
ここでは、ICではなくて、スイッチが4つあることをイメージして、モーターの回転を変える「Hブリッジ」のスイッチと回転について考えます。
通常は、MOS-FETトランジスタなどのスイッチ機能を使って、「モータードライバー」として製品化されているのですが、その原理は、下のようにIC内部でスイッチを切り替えて、それによってDCモーターの回転を切り替えるようになっています。
この接続が「H」の字のような形なので、Hブリッジと呼ばれます。
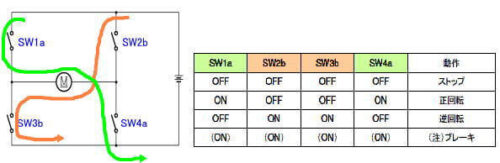
このようなスイッチ状態(ここでは、ストップ、正転、逆転、ブレーキの4パターン)を、電気的に行うようにしているのがモータードライバーです。
(注) このブレーキ機構については、DCモーターは、電圧がかからない状態(ストップした状態)でその位置を維持することが難しいので、負荷をかけた状態で静止させる場合は、何らかのブレーキ(機械的なものか電気的なもの)などで一定位置に固定する必要が出てきます。
この図のような機械的なスイッチを使うと、電流が短時間であってもショートするので、うまくいかないのですが、ICなどは瞬時にそれを切り替えて、位置を保持できるので、ショートせずに電圧がかかった状態になって、その位置が保持できるようになっています。
このモーターも位置保持の問題も重要です。 DCモーターでは、ストップ状態といっても、保持力が弱く、保持位置も安定しにくいので、DCモーターではなく、ステップモーターなどを使って、ロボットのアームなどを操作するのが一般的になっています。
モータードライバーについては、別のページでも紹介しています。