前のページでは、光を利用する素子を簡単に紹介していますが、ここでは、透過型のフォトインタラプタを使う具体例でもうすこし紹介していきます。
光を利用した素子
フォトインタラプタやフォトリフレクタは、光を出す素子と光を受けて反応する素子が組み合わさった部品です。

これらは、赤外線LEDとフォトトランジスタを使ったもので、赤外線LEDの光の大きさを、フォトトランジスタで電流の変化でとらえる仕組みですが、ここでは、フォトインタラプターを使った使い方の例を見てみましょう。
ここで紹介している型番は、メーカーでは廃版になっているようですが、同じ型番も購入できますし、型番や形状が違っても、使い方や考え方は同じです。
フォトインタラプタは、赤外線LEDとフォトトランジスタが使われていますが、このフォトインタラプタCNZ1023は、コの字型の隙間の両側にそれぞれが配置されています。
この隙間を「塞ぐか塞がない」(またはLEDの光を受けるか受けないか)でフォトトランジスタに流れる電圧または電流の変化します。
それを利用して、フォロインタラプタは
1)品物の有無や穴などの位置を判定して、なにかのアクションをさせる
2)一定時間内の開閉数で、品物の位置判定や個数、回転数などをカウントする
などで使用できることがわかります。
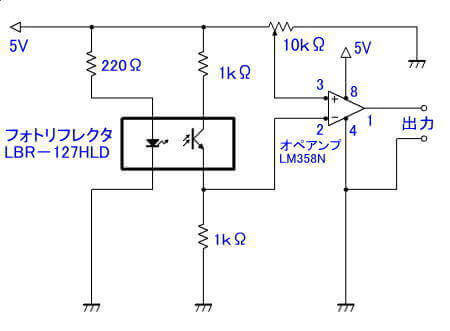
基本的な使い方(回路図)
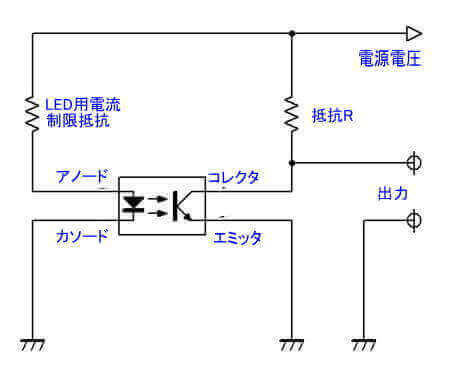
この回路では、常時にLEDは点灯しています。
そして、その光を受けて、コレクタ電流が流れている仕組みになっています。
このに書いた2つの抵抗器はいずれも電流制限用です。
(注意)購入時の製品をみると、4本足が出ており、LEDとトランジスタ側の片方の足が長くなっていたり、外装に表示があるものもありますが、わかりにくいものがあるので、データシートで確認しながら結線するのが無難です。
次に、この回路で、光の開閉による変化の様子などを見てみます。
フォトインタラプタ CNZ1023の動作

コの字型の隙間部分を何かで遮ると、LEDからの光が遮断されて、フォトトランジスタに電流が流れなくなるので、遮蔽されているときとそうでないときの違いが、出力端に電圧、電流の差で現れます。
 (前ページのデータを再掲)
(前ページのデータを再掲)
これは、電源5Vに対してトランジスタ側の抵抗値を適当に変えて測定したものですが、この結果を見ると、フォトトランジスタの特性で電流量は制限されているようで、回路の抵抗値の大きさは関係しないようです。
ただし、この数字の、開閉による電流の差は非常に小さいので、使う場合は、増幅するか、または、電流ではなく、電圧差を捉える使い方をするのが使いやすいような感じで、私は、1kΩの抵抗で使って、電圧変化を見ることで実験しています。
ここでは、一つの使い方の例として、隙間の遮蔽で電圧差を捉えて、モーターの回転数をオシロスコープで見る方法を試してみました。
 |
|
新品価格 |
![]()
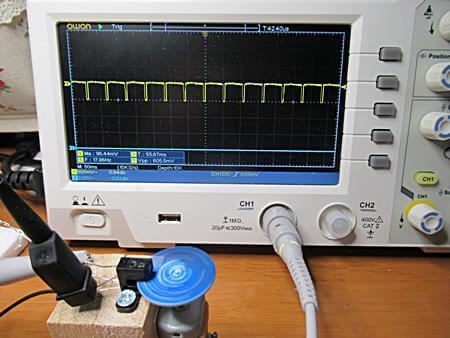
フォトインタラプタによる回転数の検出の実験
1つの使用例ですが、下の写真のように、手持ちの3V用DCモーターに回転盤をつけて、その一部に切れ込みを入れて、土台にインタラプタ(CNZ1023)とともに固定して、その回転数をはかりました。
電流が変化しているので、電圧も変化しているはずですね。
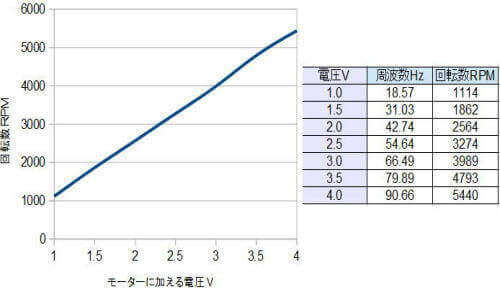
そこで、モーターの端子をオシロスコープにつなぐと、毎秒の周波数がわかるので、それを60倍して毎分の回転数(RPM)を測定してみました。
下の結果のように、モーターに加える電圧を変えた表を作って、それをグラフにすると、電圧にほぼ比例した回転数になっているのがわかりました。
これは使い方のうちの一例ですが、インタラプタのコの字内に入るものであれば、①品物があるかどうか ②穴や切込みの有無の判定 ③複数個を使って品物の位置決めをする・・・などの工業的用途だけではなしに、趣味の電子工作にも十分多目的に使えるでしょう。
たとえば、上では、回転数をデジタル的に回数として捉えていますが、回転数に応じて光量変化による電流値を、コンデンサでアナログ的な変化にしたり、電圧変化を、このHPの別ページで紹介しているコンパレータの機能を使って制限値を設けて、動作のコントロールをする … などを発展させて考えていくのも面白いと思います。