この記事は、電子工作のヒントになりそうな話題を紹介することで、自由に色々遊んでいただけるように記事を書いているもので、専門的なものではありません。
前のページでは、ブラシ付きDCモーターは、加える電圧によって回転数が変わることをみました。
ただ、動きはじめと止まる直前は、スムーズでないので、それができる方法を試してみました。
結論を言えば、トランジスタだけでは、回転は制御できるのですが、モーターの特性もあって、始動時と停止時は、スムーズに … という状態にするのは難しいことがわかりました。
回転数や回転方向の制御は、モータードライバーを使うことも多いですし(→こちらで紹介)、ここでは、低速回転に対応できる、パルスを使った回転数の制御例も紹介しています。
回転数を数えるための方法 減速ギヤーを使う

このように、歯車の組み合わせで減速すると、軸には大きなトルクが加わるので、ギヤーや滑車とベルトなどの仕組みは便利です。
これは、「タミヤ」の楽しい工作シリーズのNo.167シングルギヤボックスで、最高の減速比は344.2:1 です。
余談ですが、先のページでも紹介しましたが、電子工作でも模型部品を使うことも多いので、タミヤのHPは目を通しておけば、なにかに使えそうな面白い製品が見つかるかもしれません。
電圧を変えると回転数も変化します
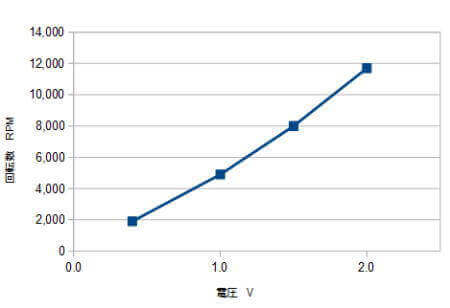
この減速ギヤに付属のDCモーターは、1.5~3V程度 が適正電圧で、0V からゆっくり電圧を加えていくと、0.4Vで動き始めました。
その時の回転数は約1900RPMで、停止時の0RPMから、急に毎秒30回転で回り始めます。
つまり、「徐々にスタートする」という状態にはなりません。
そして、電圧を高くすると、ほぼ電圧に比例して回転数が上がっていきます。(この数値は、モーターの仕様書にある数値とは異なっていますが、1つの測定値として図を見てください)
つまり、DCモーターで、ロボットアームなどを、超スローでスムーズに動かすという用途に使うのは難しいということになります。
回り始めと停止の瞬間の電流変化を詳しく見てみました
0Vから電圧を上げていって、モーターが回転し始めるときと、0.4Vで回転している状態から電圧を下げていって、止まったときの状態を測定すると、次の表のようになりました。
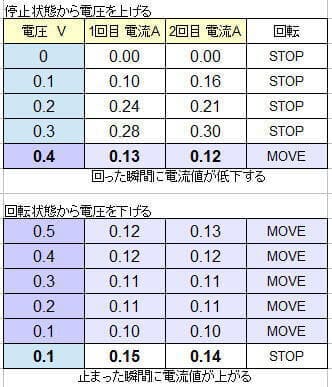
このとき、電圧徐々にを加えていくと、モーターが止まっている状態で電流が増えていき、モーターが回り始めた瞬間に、消費電流が大きく低下しています。
また、回転している状態のモーターが停止した瞬間にも、急に電流値が増えています。
つまり、動き出すときと止まる瞬間で、急激な電流変化があります。
そして、止まっている状態から電圧がかかって動き出せばすぐに、すぐに高回転になるので、特に、電圧と電流の変化だけで、モーターが動き出すときと止まるときにの回転速度をスムーズに制御することは思ったほどにうまくいきません。
トランジスタを使ってスムーズな動きができないだろうか?
トランジスタのページ(→こちら)で書いていますが、電流増幅用のモノポーラトランジスタを使って、100mA程度の電流を制御できるので、この電流制御で、モーターの回転の様子試してみましょう。
基本的には、電圧と電流は相互の助け合いの関係があるので、電流をたくさん流そうとすると、それなりの電圧が必要になりますし、同様に、ある程度の電圧がなければ、充分な電流が流せません。
つまり、DCモーターの回転は、電圧で変わるといってもいいですし、その変化は電流で捉えてもわかるはずです。
ともかく、電流変化でモーター回転の制御を試してみましょう。
![]()
タミヤのギヤボックスについているFA130タイプのDCモーターは、通常電流は100mAを超えていますが、手持ちのFA130型のものは、100mA以下で回転するので、このモーターをつかえば、よく使うトランジスタ(2SA1815)で電流量を変えて速度制御の変化がわかります。(2SA1815はコレクタ最大電流が150mAですから、この実験に使えます)
でも、結果を先に言うと、回転している状態では、電流変化(すなわち電圧変化)による速度のコントロールはできるのですが、DCモーターの動き始めと止まるときは、うまくいきませんでした。
結局、「回りはじめ」には大きな力が必要になり、回り始めると、急に1000RPM以上で高速で回りだす … という状態です。
これはうまくいきませんでしたが、トライすることは大事ですので、経過を紹介しておきます。
バイポーラトランジスタを使った回転制御
手持ちのDCモーター(FA130型)は、100mA以下の消費電流で、1.5~3Vでうまく回ってくれるので、トランジスタ2SC1815 を使って、下図の回路で実験してみました。
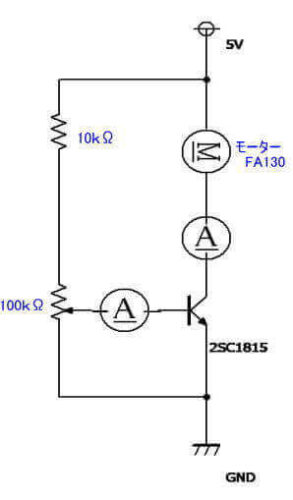
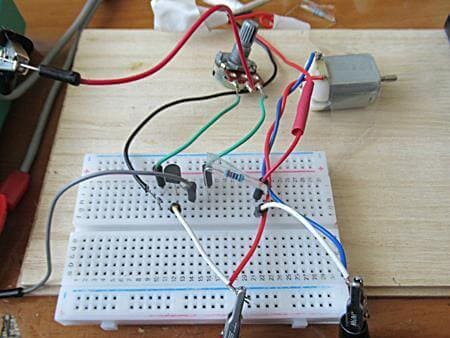
この回路で、コレクタ電流を変えて 2SC1815 の最大能力まで、電流を流せるはずです。
(→こちらのLEDの点灯回路でこれを説明しています)
このように、電圧と電流が変化して、回転が変わるのですが、肝心の回り始めと止まる直前は、スムーズな変化になりません。
やはり、この方法では、起動と停止時の制御はダメのようです。
特に、回りはじめは、かなりのパワーが必要になります。
FETでもやってみましたが、やはりうまくいきませんでした
MOS-FETは大きな電流が流せるので、MOS-FETの2SK4017Q(60V・5A)を用いて、下の回路で、同じようにやってみました。
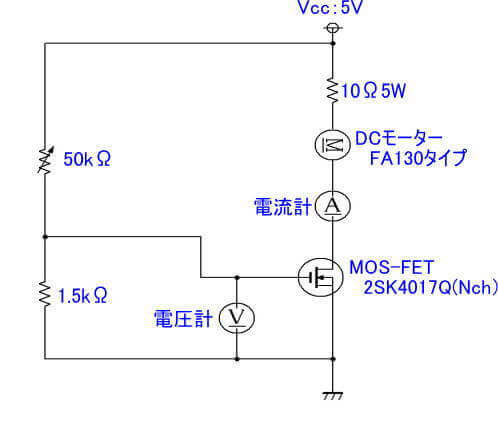
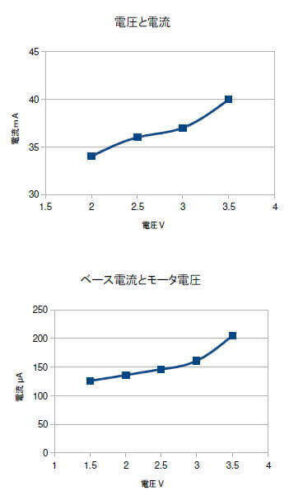
ボリュームを回すと、ゲートとソースの電圧が0.1V~4.9Vに変化して、それに対して、ドレイン電流は0mAから60mAと変化して、うまくモーターは速度を変えて回転しているのですが、やはり、起動~停止は、スムーズではありません。
しかし、電流パルス制御で、低速から回す事ができます
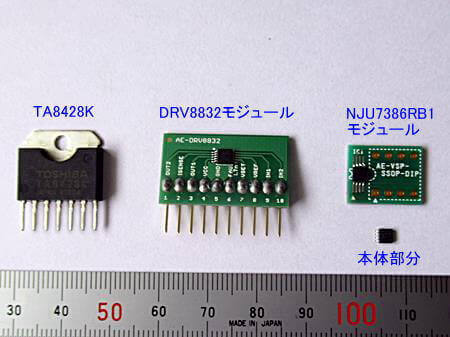
この例では、秋月電気さんから、写真のような 「PWMスイッチングDCモーター速度可変セット」が販売されています。(→こちらのページでも紹介しています)
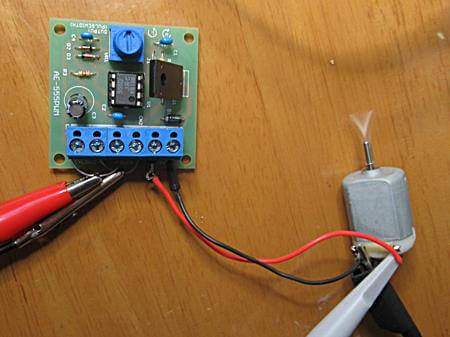
このキットは、タイマーIC「555」を使って、発振波形のデューティ比を変えて、流れる電流値を変えることで、モーターの速度を変える仕組みのようです。
これであれば、モーターは低速から回りだしますし、スムーズに減速して停止します。
そこで、モーターが回転している状態で、出力された波形の電圧をオシロスコープで見ると、電圧の最大値が10V以上あります。
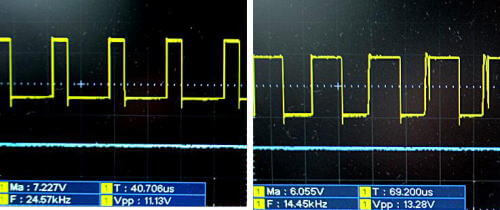
このような高い電圧でも、周波数が10kHz以上と、瞬間にON-OFFするので、モーターがその電圧に追従しないで、見かけの電圧が3V程度以下になって、正常に回転するという原理のようです。
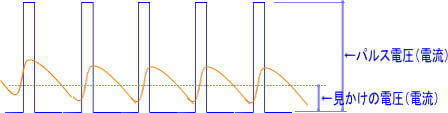
このようなしくみによって、このDCモーターでは、100RPM程度という、かなり低速度からモーターを回し始めることができます。
同様に、マイコンを利用して、パルスの状態を変える方法も使えそうです。
マイコンなどを使うデジタル的な方法は、このHP記事の範囲外の領域なので、ここでは取り上げませんが、このマイコンによるパルス制御も、上のように、555タイマーICを使った場合と同様で、モーターに充分な電圧をかけて、見かけの電流・電圧を制御することで、始動時には充分なトルクが得られて、スロースタートができるということのようです。
何かの場合に覚えておくといいでしょう。
このページでは、DCモーターは、電圧によって回転数の制御は出来ますが、回り始めと止まるときの回転制御は難しいということがわかりました。
そこで、次のページでは、モータードライバー(既製の製品)の制御の様子をみてみます。
 |
|
【New】Amazon Fire TV Stick 4K Select | 4Kの高画質ストリーミング | ストリーミングメディアプレイヤー 新品価格 |
![]()