このページは電子工作を楽しめるように書いているもので、専門的な内容ではありません。
モータードライバーは、モーターの回転方向を変えたり、回転数を変化させることができるような機能をIC化した部品です。 ステップモーターや交流モーター用などのドライバーもあります。
ここでは、電子工作に用いる小型のDCモーター用のドライバICの使い方などを紹介します。
DCモーターの正逆転と回転速度調節
DCモーターの回転方向を変えるためには、前のページ(→こちら)の記事で ①2つの電池(電源)の極性をスイッチで切り替える方法 ②1つの電源で2回路2接点のスイッチ(中立付き)を使って切り替える方法 ③スイッチ等で「Hブリッジ回路」を使う方法 … などの方法が使えます。
基本的に、DCモーターの回転速度は、電圧を変化させて制御するのですが、前のページで試したように、モーターの特性上、モーター単独での超低速回転状態での制御は難しい … ということも見てきました。
モータードライバーを使うと、そのような特殊な状態に対処できるのかを合わせてみていきます。
DC用モータードライバーとは
回転方向を変えるモータードライバー(モータードライバ用のIC)の多くは、上の ③Hブリッジを用いて無接点で制御する方法が主流です。
あとで説明しますが、ドライバーICの制御用端子に規定の電圧を加えるだけで、無接点でモーターの回転方向を変えることができるようになっています。
さらに、モータードライバICを使うと、DCモーターに「ブレーキをかけた状態」を作り出すことができます。 もちろん、電気的なブレーキなので、強力なブレーキ力は望めませんが・・・。
そして、問題の、DCモーターの回転速度を変える方法は、前のページ(→こちら)でみたように、回転している状態では、供給する電圧を変える方法が一般的です。
その他の方法としては、例えば、モーターに可変抵抗を直列することで、電圧・電流が変化するので、ある程度の速度が変えることなども考えられますが、抵抗を使うと、電圧降下分のエネルギーが、発熱で失われたり、熱の悪影響を受けますし、何よりも、効率が悪くなるので、この場合は、PWMという、パルス制御を用いたモータードライバーを用いることが行われます。
このPWMは、この後でも説明していますが、発振パルスのパルス幅を変えて、電圧電流値を制御する方法によって、DCモーターの回転速度を変える方法です。
ただ、アナログ回路でパルスを使うには、回路を構成するための部品数が増えるので、他の機能を合わせてデジタル(例えばマイコンなど)で処理する方法のほうが扱いやすいことから、一般的にはマイコンを使ってモータードライバーを利用してコントロールさせます。
モータードライバーは、デジタル知識がなくても使えますので、気軽に使えます。
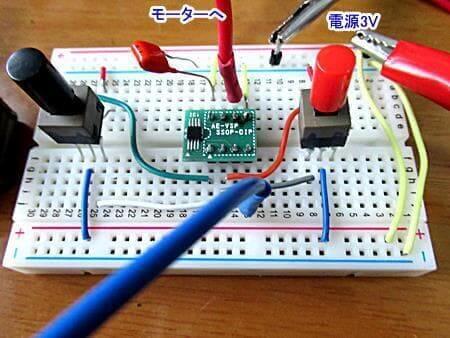
例えば、下のモータードライバーDRV8832では、制御の理屈などを知らなくても、ボリュームを回して速度の調節ができます。
さらに、その他の回転状態などの状況監視機能などが組み込まれているモータードライバーもあります。
このHPはアナログ中心に紹介していますので、デジタル的な説明にならないように、また、難しいことはパスして見ていきます。
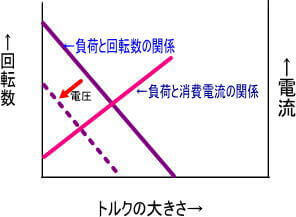
この図はも、平易に言うと、①負荷が増えると電流を食う(電流が増える) ②負荷が増えると回わりにくくなる ③回転数が下がると回りにくくなる ④電圧を下げると回転数が下がる … などを示しています。
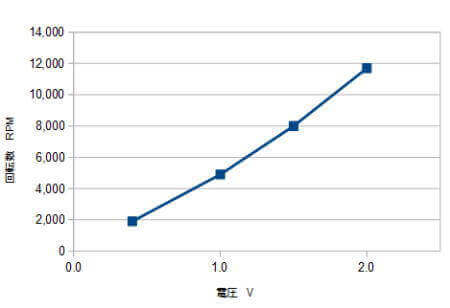
つまりここでは、DCモーター単独で回転数を変えるには、モーターに加える電圧を下げるのが手っ取り早いのですが、そうすると、回転力(トルク)も低下してきます。
実際にやってみるとわかるのですが、高い回転数の状態から、加える電圧を徐々に下げていくと、回転中は、慣性(惰性)もあるので、結構低速まで回転数を落とすことができます。 しかし、始動させる場合はうまくいきません。
モーターが止まっている状態から、電圧を徐々に上げて、モーターを回転させようとすると、無負荷の場合は(モーターによるのですが) ある程度低い電圧から始動しますが、少し負荷のかかった使用状態では、起動時の電圧がある程度高くなっていなければ回り始めませんし、回転する電圧になって回転し始めると、急に(例えば、1000RPM以上の)高回転で回り始めるので、「ゆっくりと回り始める」と言う感じにはなってくれません。(→前のページでも紹介しています)
それを払拭した方法の一つが PMW という方法です。
PWM(パルス幅制御駆動)とは
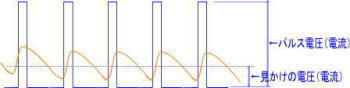
「PWM(パルス幅制御駆動)」という方法は、電圧(電流)をパルス状に加えることで回転を制御しようというものです。
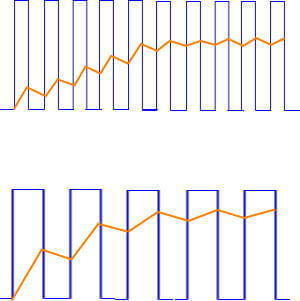
この図はイメージ図で、青色のパルス電圧を加えると、オレンジ色のように、パルスが累積されて、あたかも電力(電流と電圧)がゆっくりと付加されているような状態になります。
これは、モーターの標準電圧より、かなり高い電圧のパルスを加えるのですが、一定時間後には、パルス条件に応じた、ある一定の回転数に落ち着きます。 図はそれを模式的に示しています。
他にも、パルス幅(周波数)を変えるものもあります。
つまり、モーターの回転速度を調節しようとすれば、パルス高さ(電圧)とパルス幅(周波数)を変えるか、または、デューティ比(1周期内のON-OFF割合)を変えればそれが可能になります。(後半でも説明しています)
このPWM方式の利点は、3V駆動のモーターであっても、パルス電圧(Vpp)を、たとえば10V などのように、かなり高い電圧が使えるために、流せる電流に余裕ができ、トルクが高く取れることにあります。
もちろん、パルス電圧を高くしても、周波数が高いので、モーターに加わる、見かけの平均電圧はかなり低く、パルス電圧の数分の一になっているように振る舞うので、モーターに高電圧のダメージを与えることなく、100~200RMP程度の低い回転数でモーターを回し始めることができます。
ただし、このような仕組みや動作は、アナログ回路で作り出すよりも、デジタルのほうが簡単です。
そのために、モータードライバーを用いて、マイコンなどによって、停止状態を保持するような機能を含めて、デジタル的にパルス制御によって速度を変えているのが一般的で、直流電車のインバータ制御なども同じような考え方です。
このPWMを使って、DCモーターをゼロ速度から起動して、速度を変える使い方ができるのは、DCモーターの大きな長所といえるでしょう。
DC用モータードライバーの例
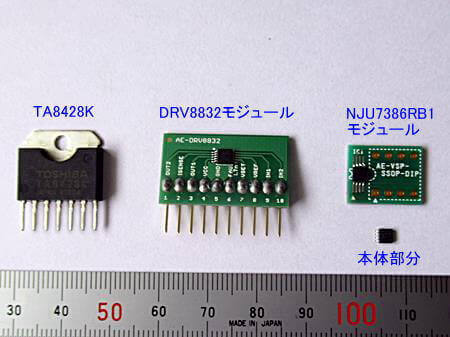
私の手元にあるモータードライバーの製品です。 ここでは、これらをデジタル的な部品と意識しないで、アナログDCで簡単に使用できるものと考えておきましょう。
ドライバ選択は、正逆転だけか、速度調節が必要か … で選ぶ
真ん中のDRV8832には速度調節機能があります。しかし、他の2つは速度調節機能がないタイプです。
いずれも、無接点でのON・OFF・正逆転の機能が備わっています。
(注)ここでいう速度調節は、充分に回転できる電圧で正逆転させるため、上で取り上げたような、起動時にゆっくりと始動させることはうまくできないと考えておいてください。
真ん中のDRV8832は、秋月電子さんで購入したモジュール化されたドライバーで、VREF・VSET という端子を用いて速度調節をします。
最も簡単な方法では、ボリューム(可変抵抗器)をつけることで、それを回して速度調節ができます。
もちろん、前のページでも取り上げましたが、ドライバー製品を使わないで、デジタル回路でパルス駆動する方法の例を、この記事の最後に紹介しています。
まずここでは、ドライバーの市販品を使って、手動で(アナログ的に)正逆回転、ストップの動作に加えて、速度調節できるドライバーの例を紹介します。
DRV8832のモータードライバモジュール
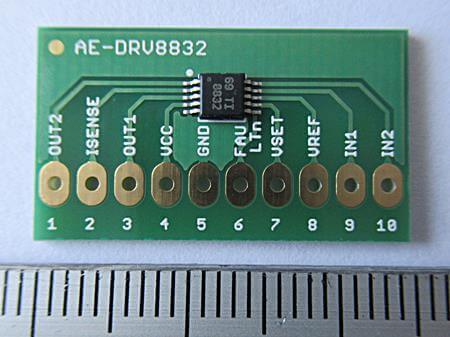
これは秋月電子さんが販売しているDRV8832のモジュールです。
ドライバー自体のIC(10本足の部品)は5mm程度と小さいために、電子工作で取り扱うには、このようにモジュール化されておれば、非常に使いやすくて便利です。(このモジュールの価格は200円程度でした)
次のページでは、非常に小さなドライバーNJU7386 のモジュール基板へのはんだ付けの仕方を紹介しています(上の写真の3つのうちの右側の製品)。
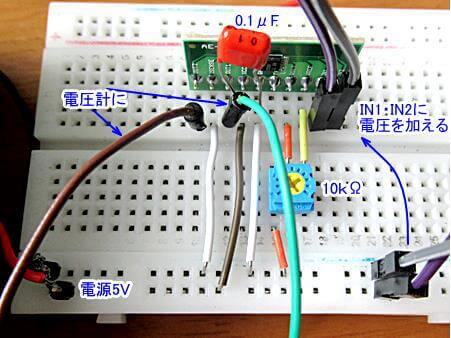
DRV8832の一般的な使い方の例
このドライバーは、VREF・VSET という端子があり、ここに、10kΩの半固定抵抗を使って回転速度を変えることができるようになっています。
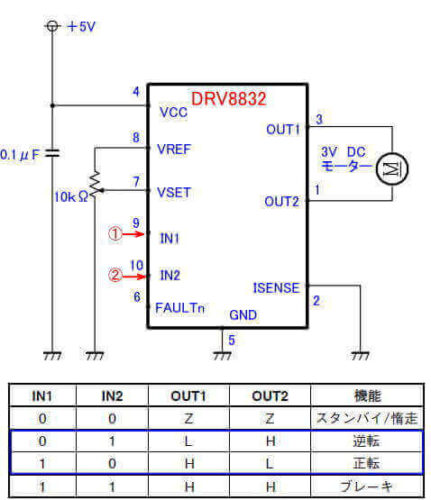
ここでは、電源電圧5Vをそのまま加えています。(DRV8832の作動範囲は2.75~6Vです)
この表では、IN1・IN2の「1」はプラス電圧を、もう一方の 「0」はGNDに接続することを表しています。
そして、このように、どちらかの端子に電圧をかけると正逆転させることができます。
また、OUT側の「H」は「電圧が出ていること」を示しています。 また、LはGNDレベル、Zはフリーな状態ということを表しています。
これをブレッドボードに配線して、モーターの代わりにテスターをつけて電圧を測ってみました。
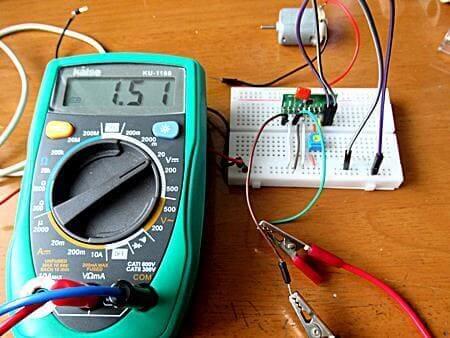
ここで、表のIN1・IN2にあるように、どちらかに5V(実測値4.95V)をかけてボリュームを回すと、出力側では+0.15V~+4.95Vで正転し、反対にすると、-0.15V~-4.95Vの電圧がでていますので、これで正逆転と速度のコントロールができることがわかります。(注:ここでも、停止状態からゆっくり起動させる「スロースタート」はうまくできません)
この、INの電圧を切り替えて加えるのには、切り替えスイッチ(スナップスイッチなど)を使えば問題ないでしょう。
モータードライバーを使う場合の注意
多くのモータードライバーは「動作電源電圧の範囲」が指定されています。 これは、電源電圧が出力電圧に関係するためで、モーターの常用電圧にも注意しておく必要があります。(高い電圧を加えるとモーターが焼損します)
このドライバーDRV8832は入力電圧が3~6V程度になっていますので、3Vのモーターを使うのであれば、モーター保護のために、モーターに合わせた3V程度の電源電圧にするか、固定抵抗を10kΩに直列するなどの対策をして、高い電圧が出ないような安全策を考えておきましょう。
さらに、注意点としては、回転をかえるときには、少し時間をとってゆっくり変化させるようにしましょう。
これは、モータードライバーを使わないでスイッチで逆転させる場合も同様で、負荷によって、正逆転時に大きな電流が流れるためです。
回転を変えるときには、回転が落ちるまでのインターバルを取るようにし、急な正逆転は避けるようにしましょう。
また、ここでは、模型や電子工作でよく使うFA130やRA280などの小さなモーターを使っているので、電流も少なく、発熱する問題もないのですが、たくさんの電流に耐えるモータードライバーを使おうとすると高価になるので、電流量や発熱対策が必要になる場合もあるので、注意が必要です。
(おことわり) 今回のDRV8832には、「FAULTn端子」を使って電流制限ができる便利な機能があるようですが、私自体が使い方がよくわからなかったので、ここでは使っていません。
→Amazonのページでも、いろんなドライバーが販売されています
![]()
使いやすい形状のモータードライバ TK8428K
上の写真の左側のモータドライバー TK8428K は、ブレッドボードやユニバーサル基板には使いやすい形状です。
ただ、このTK8428Kはすでに旧型番となっていて、代替品では、TB6643などの同形状のものなどがあります。
電子部品の入れ替わりは避けられません。
代替品を探す場合は、「DCモーター用」「電源電圧」「モーター電圧」「モーター電流」をチェックして使えるかどうかを見ておけば、特に問題は生じません。
また、WEBでモータードライバーを探すと、非常に小さい実装部品用のものが多いようで、部品が小さいと、通常のはんだ付けでの工作は無理です。
しかし、例えば、写真の NJU7386 は、単体では小さいのですが、秋月電子さんでは使いやすいようにと、モジュール化用の基板を用意しています。
それを使って、次のページでは、使い方を紹介していますので参考にしてください。
モータードライバーを使う長短所
私がやっている電子工作の程度では、回転を落とすのであれば、トルク面でも有利なギヤーによる減速のほうが実用的です。
しかし、モータードライバーを使うと、無接点で電気的に操作できるので、いろんな使い方が広がるでしょう。
アナログ回路で、モータードライバーを使ってDCモーターの制御をする場合、 ①無接点にしたい ②回路をコンパクトにしたい ③いろいろな保護回路や警報回路が内蔵されている … などでのメリットがあります。 価格も高価でないので、使うときの利点は多いでしょう。
ただ、ユニバーサル基板に組み付けるとすると、 (A)小さくて取り扱いにくい (B)余分な費用がかかる (C)使い方がわかりにくい … などのデメリットもあります。
PWM を使ってDCモーターの速度を変える
最後になりますが、モータードライバー製品ではないのですが、秋月電子さんから販売されている、タイマーIC「NE555」を使った、スイッチングによるDCモーターの速度調節キットを紹介します。
これを使うと、結構低速での起動停止ができます。 私の実験で、低速での起動や停止がうまく動作したのは、この方式だけでしたので、覚えておくと便利でしょう。
秋月電子さんで販売している、写真のよな「PWM DCモーター 速度可変キット」は500円と安価ですし、組み立て工作も楽しめますので、興味ある方は秋月さんのHPをチェックしてみてください。
file:///D:/%E2%98%85%E2%98%85HP/%E2%98%85HP_875s_Now/kousaku/img/6482.jpg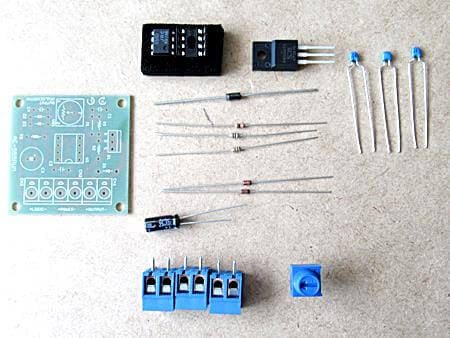
これを組み上げると下のようになります。

これは9Vで作動させるのですが、回路的には、タイマーIC(NE555)を使って方形波を発振させて、FETを使ってモーター電流を制御している回路構成で、写真のように非常にシンプルなものです。
回路図はキットに添付されています。 製作も簡単で、確実に動きます。
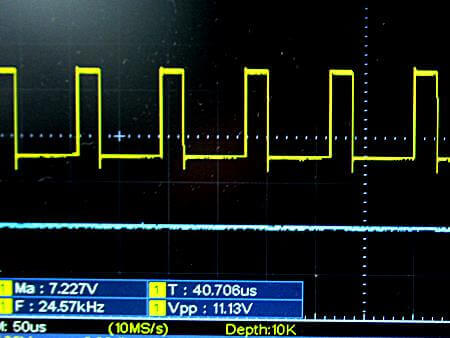
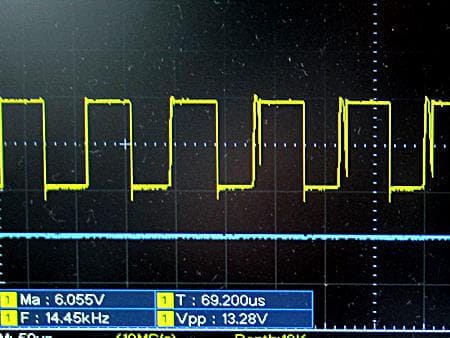
オシロスコープを使って、回転数を変えた状況をみてみるために、ボリュームを右に回していくと、デューティ比が上がり、電流量が増えて回転数が上がっています。
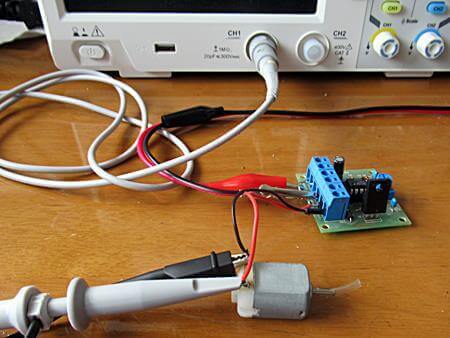
画面の出力電圧(山の高さ:Vpp)を見ると、11.13V、13.28Vと、かなり高い電圧をモーターに加えて、発振周期(T)や周波数(F)を調整しているのがわかります。
 波形2
波形2
上が低速回転のときで、下が、それよりも少し回転を上げたときのオシロスコープの波形とデータです。少しノイズをひろっているのですが、無視してください。
ボリュームを左に絞っていくと、モーターは毎秒1回転程度の超低速で回りますし、右に回すと通常の高速回転します。そして、結構なめらかに回転数が変化します。
次のページでも、別のドライバーを使って紹介しています。